How to Use FurnitureSim
Contents
How to Use FurnitureSim#
FurnitureSim Environments#
Environment List#
- The following environments are available in FurnitureSim:
FurnitureSim-v0is the most basic environment. The observation includes 224x224 images from the wrist and front cameras and the robot state.FurnitureSimFull-v0is mainly used for data collection, which serves all available observations: robot state, object poses, and color and depth images from the wrist, front, and rear cameras.FurnitureSimImageFeature-v0uses the pre-trained image features (R3M or VIP) as observation instead of images.FurnitureSimState-v0is a state-based environment.FurnitureDummy-v0can be used if you only need the environment spec for pixel-based policies.FurnitureImageFeatureDummy-v0can be used if you only need the environment spec for policies with pre-trained visual encoders.FurnitureSimLegacy-v0is the deprecated environment used in the main paper.
Warning
FurnitureSim is not yet optimized for multi-environment simulation. It will be soon supported.
FurnitureSim Configuration#
FurnitureSim can be configured with the following arguments:
import furniture_bench
import gym
env = gym.make(
"FurnitureSim-v0",
furniture, # Specifies the type of furniture [lamp | square_table | desk | drawer | cabinet | round_table | stool | chair | one_leg].
num_envs=1, # Number of parallel environments.
obs_keys=None, # List of observations.
concat_robot_state=False, # Whether to return robot_state in a vector or dictionary.
resize_img=True, # If true, images are resized to 224 x 224.
headless=False, # If true, simulation runs without GUI.
compute_device_id=0, # GPU device ID for simulation.
graphics_device_id=0, # GPU device ID for rendering.
init_assembled=False, # If true, the environment is initialized with assembled furniture.
np_step_out=False, # If true, env.step() returns Numpy arrays.
channel_first=False, # If true, images are returned in channel first format.
randomness="low", # Level of randomness in the environment [low | med | high].
high_random_idx=-1, # Index of the high randomness level (range: [0-2]). Default -1 will randomly select the index within the range.
save_camera_input=False, # If true, the initial camera inputs are saved.
record=False, # If true, videos of the wrist and front cameras' RGB inputs are recorded.
max_env_steps=3000, # Maximum number of steps per episode.
act_rot_repr='quat' # Representation of rotation for action space. Options are 'quat' and 'axis'.
)
FurnitureSim env.step#
The input and output of the APIs are as follows:
"""
# Input
action: torch.Tensor or np.ndarray (shape: [num_envs, action_dim]) # Action space is 8-dimensional (3D EE delta position, 4D EE delta rotation (quaternion), and 1D gripper.Range to [-1, 1].
# Output
obs: Dictionary of observations. The keys are specified in obs_keys. The default keys are: ['color_image1', 'color_image2', 'robot_state'].
reward: torch.Tensor or np.ndarray (shape: [num_envs, 1])
done: torch.Tensor or np.ndarray (shape: [num_envs, 1])
info: Dictionary of additional information.
"""
env = gym.make(
"FurnitureSim-v0",
furniture='one_leg',
num_envs=1,
)
ac = torch.tensor(env.action_space.sample()).float().to('cuda') # (1, 8) torch.Tensor
ob, rew, done, _ = env.step(ac)
print(ob.keys()) # ['color_image1', 'color_image2', 'robot_state']
print(ob['robot_state'].keys()) # ['ee_pos', 'ee_quat', 'ee_pos_vel', 'ee_ori_vel', 'gripper_width']
print(ob['color_image1'].shape) # Wrist camera of shape (1, 224, 224, 3)
print(ob['color_image2'].shape) # Front camera os shape (1, 224, 224, 3)
print(rew.shape) # (1, 1)
print(done.shape) # (1, 1)
FurnitureSim Arguments#
furniturecan be one of[lamp|square_table|desk|drawer|cabinet|round_table|stool|chair|one_leg].randomnesscontrols the randomness level of the initial states identically to FurnitureBench (see How to Use FurnitureBench).init_assembledinitializes FurnitureSim with fully assembled furniture models:
python -m furniture_bench.scripts.run_sim_env --furniture <furniture> --init-assembled
FurnitureSim initialized with an assembled chair.#
save_camera_inputsaves camera inputs of the first frame of an episode tosim_camera/.
python -m furniture_bench.scripts.run_sim_env --furniture <furniture> --init-assembled --save-camera-input
Images from wrist and front camera.#
To get all available observations, initialize
FurnitureSimFull-v0environment.resize_imgwill resize the images to 224 x 224. This argument is set toTrueby default.--high-resflag inrun_sim_env.pyis a negation ofresize_imgargument.
python -m furniture_bench.scripts.run_sim_env --furniture <furniture> --init-assembled --save-camera-input --env-id FurnitureSimFull-v0 --high-res
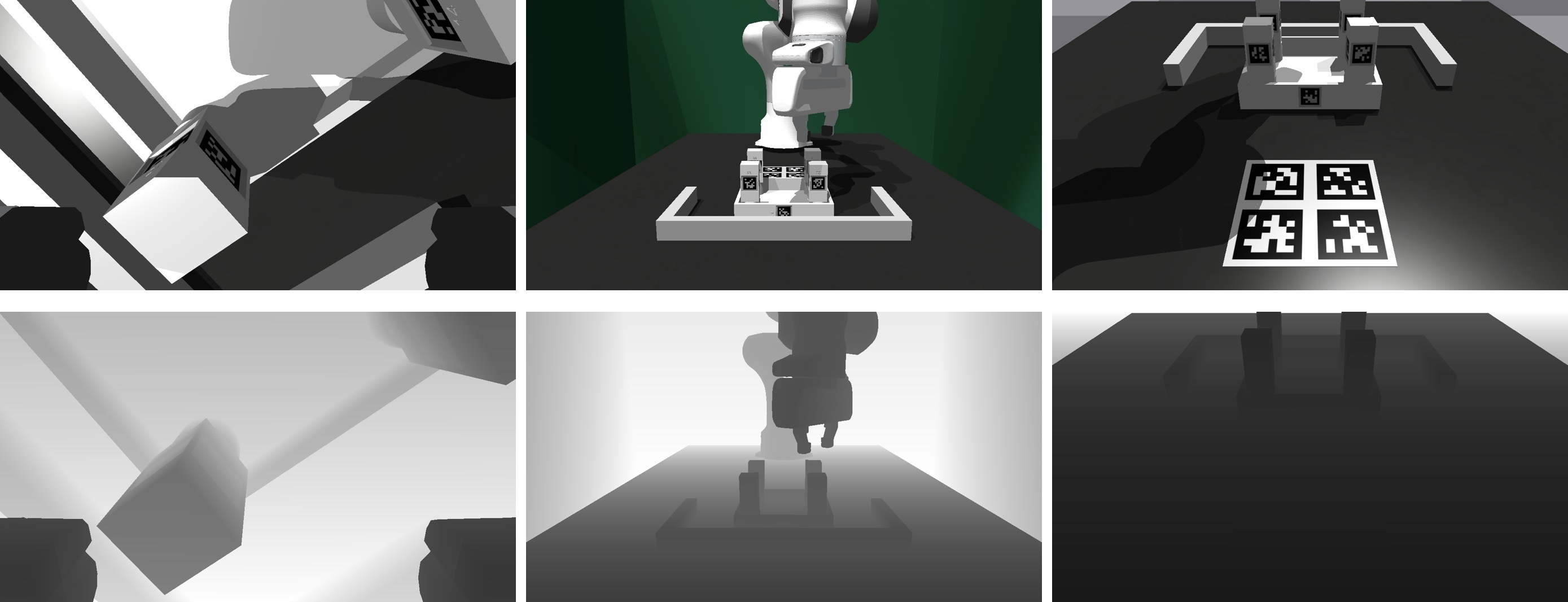
Wrist, front, and rear camera views of square_table.#
recordrecords the wrist and front camera inputs and saves each episode inmp4tosim_record/.
Example video.#
Automated Assembly Script#
We provide automated furniture assembly scripts. It currently supports one_leg, cabinet, lamp, and round_table.
python -m furniture_bench.scripts.run_sim_env --furniture <one_leg | cabinet | lamp | round_table> --scripted
Data Collection: Using our scripted policy, you can collect num-demos demonstrations. If you use Docker, make sure you mount the output data path to the Docker container before you collect data.
python -m furniture_bench.scripts.collect_data --furniture <furniture> --scripted --is-sim --out-data-path <path/to/output> --compute-device-id <compute_device_id> --graphics-device-id <graphics_device_id> --num-demos <num_demos> --headless
# E.g., collect 100 demonstrations for one_leg assembly
python -m furniture_bench.scripts.collect_data --furniture one_leg --scripted --is-sim --out-data-path scripted_sim_demo --compute-device-id 0 --graphics-device-id 0 --num-demos 100 --headless
Here are some additional flags for collect_data.py:
--pkl-only: The scriptcollect_data.py, by default, saves high-resolution color images inmp4and depth images inpngalong with pickle file. Set this flag if you want to save onlypklfiles.--save-failure: The scriptcollect_data.py, by default, only saves successful trajectories when demonstrations are collected by assembly script. Set this flag if you want to save failed demonstrations as well.
To visualize a collected demonstration, use the following script with a demonstration path (i.e., a directory containing pkl and mp4 files of one trajectory):
python -m furniture_bench.scripts.show_trajectory --data-dir <path/to/data>
# E.g., show a sequence of three camera inputs with metadata
python -m furniture_bench.scripts.show_trajectory --data-dir scripted_sim_demo/one_leg/2022-12-22-03:19:48
Tip
On your initial run, starting up FurnitureSim will take some time to construct SDF meshes. However, the next runs will be launched much faster with the cached SDF meshes.
Teleoperation in FurnitureSim#
FurnitureSim supports teleoperation using a keyboard and Oculus Quest 2. You first need to set up Oculus Quest 2 by following Teleoperation.
To start FurnitureSim with teleoperation, execute the following command:
python -m furniture_bench.scripts.collect_data --furniture <furniture> --out-data-path <path/to/output> --is-sim
By default, both keyboard and Oculus Quest 2 will be used for teleoperation. You can also choose to use only keyboard (--input-device keyboard) or Oculus (--input-device oculus).