FurnitureBench
FurnitureBench#
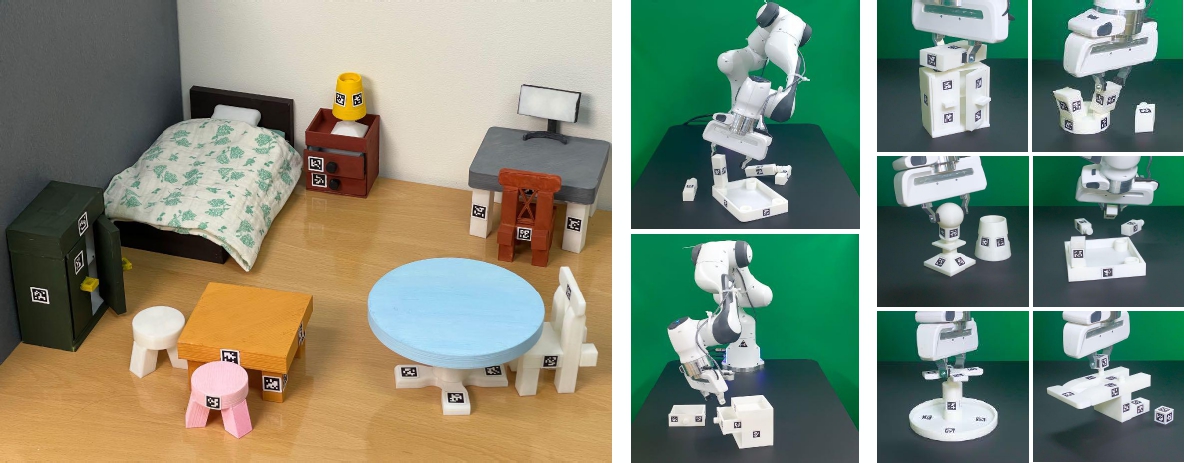
FurnitureBench is a reproducible real-world furniture assembly benchmark for long-horizon and complex robotic manipulation. It includes a standardized environment setup and a large dataset of over 200 hours of teleoperation demonstrations. Furthermore, we provide a simulator, FurnitureSim, that enables easy and fast evaluation of algorithms.
This document includes FurnitureBench setup instructions, links to datasets and 3D models, and basic tutorials for FurnitureBench and FurnitureSim. A general overview of FurnitureBench is available in our project website.
If you use FurnitureBench in your research, please cite our paper:
@inproceedings{heo2023furniturebench,
title={FurnitureBench: Reproducible Real-World Benchmark for Long-Horizon Complex Manipulation},
author={Minho Heo and Youngwoon Lee and Doohyun Lee and Joseph J. Lim},
booktitle={Robotics: Science and Systems},
year={2023}
}