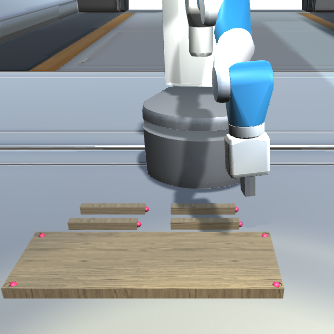
Furniture Assembly
Complex long-horizon manipulation task
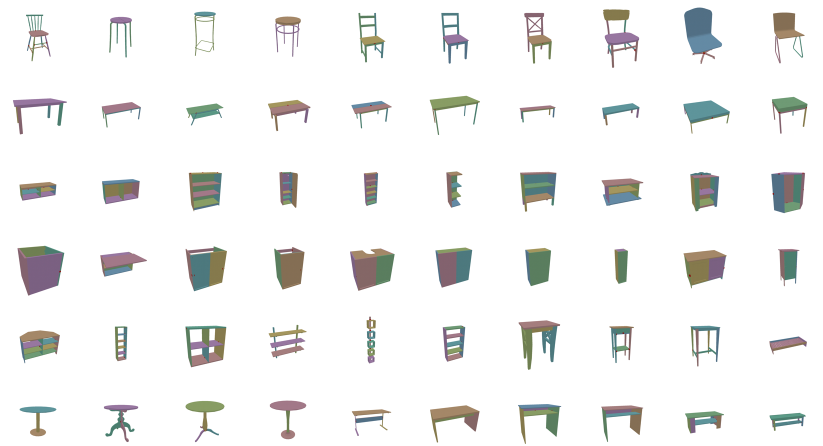
Diversity
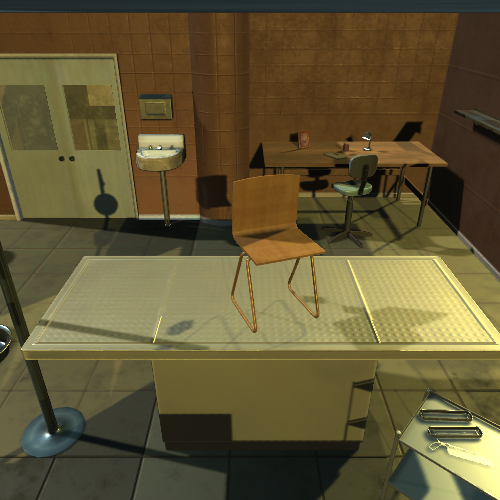
60+ furniture models, customizable background, lighting and textures
Robots
Baxter, Sawyer, and more
Easy to Use
OpenAI Gym interface for imitation / reinforcement learning
IKEA Furniture Assembly Environment
Complex long-horizon manipulation task
60+ furniture models, customizable background, lighting and textures
Baxter, Sawyer, and more
OpenAI Gym interface for imitation / reinforcement learning
|
|
|
|
|
|
|
|
|
|
|
|

|

|
|
|
While we worked hard to provide a comprehensive furniture assembly environment, there are many potential avenues for extension.
@inproceedings{lee2021ikea,
title={{IKEA} Furniture Assembly Environment for Long-Horizon Complex Manipulation Tasks},
author={Lee, Youngwoon and Hu, Edward S and Lim, Joseph J},
booktitle={IEEE International Conference on Robotics and Automation (ICRA)},
year={2021},
url={https://clvrai.com/furniture},
}
For bug reports, feedback, or comments, please fill out this form, or create a github issue, or email Youngwoon Lee (lee504@usc.edu).