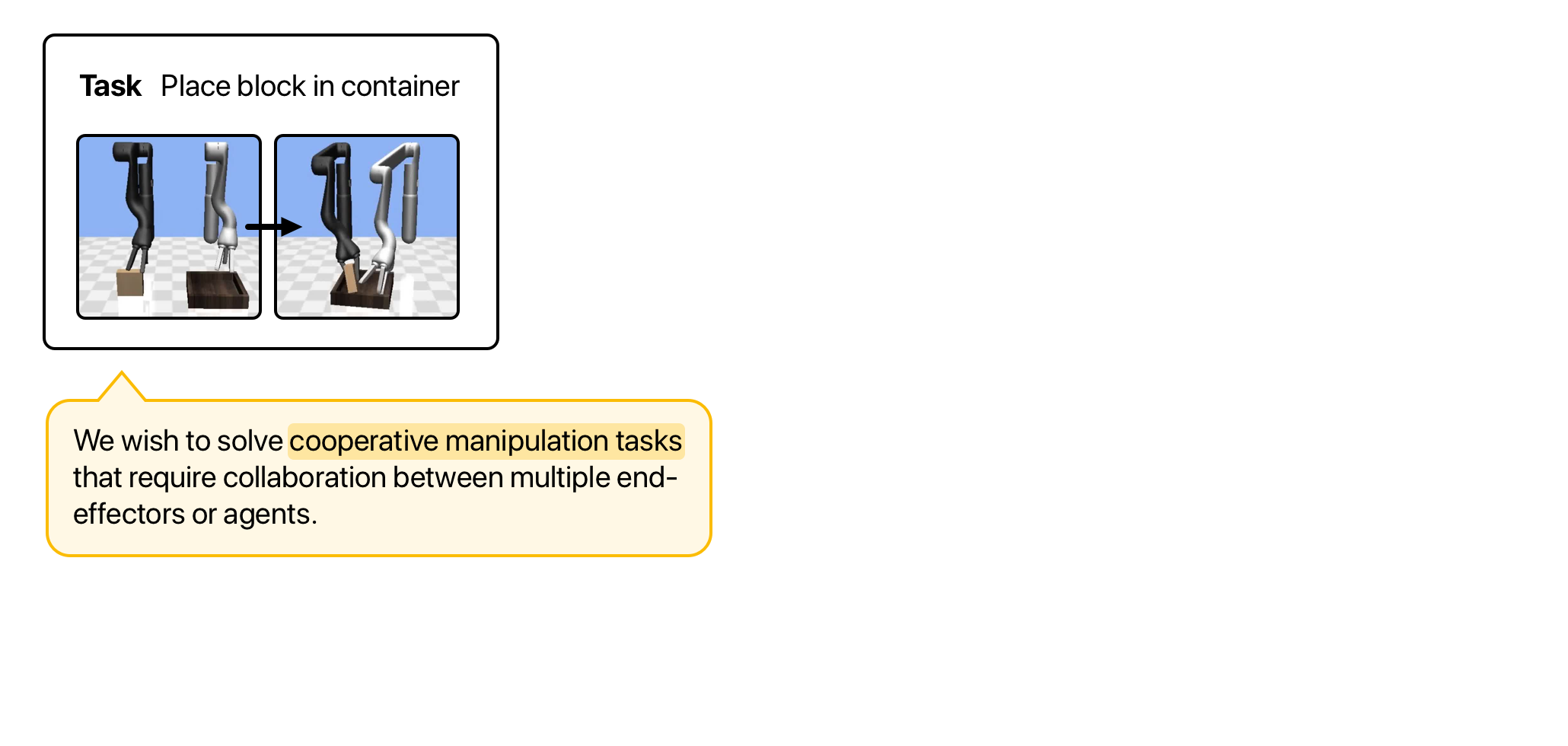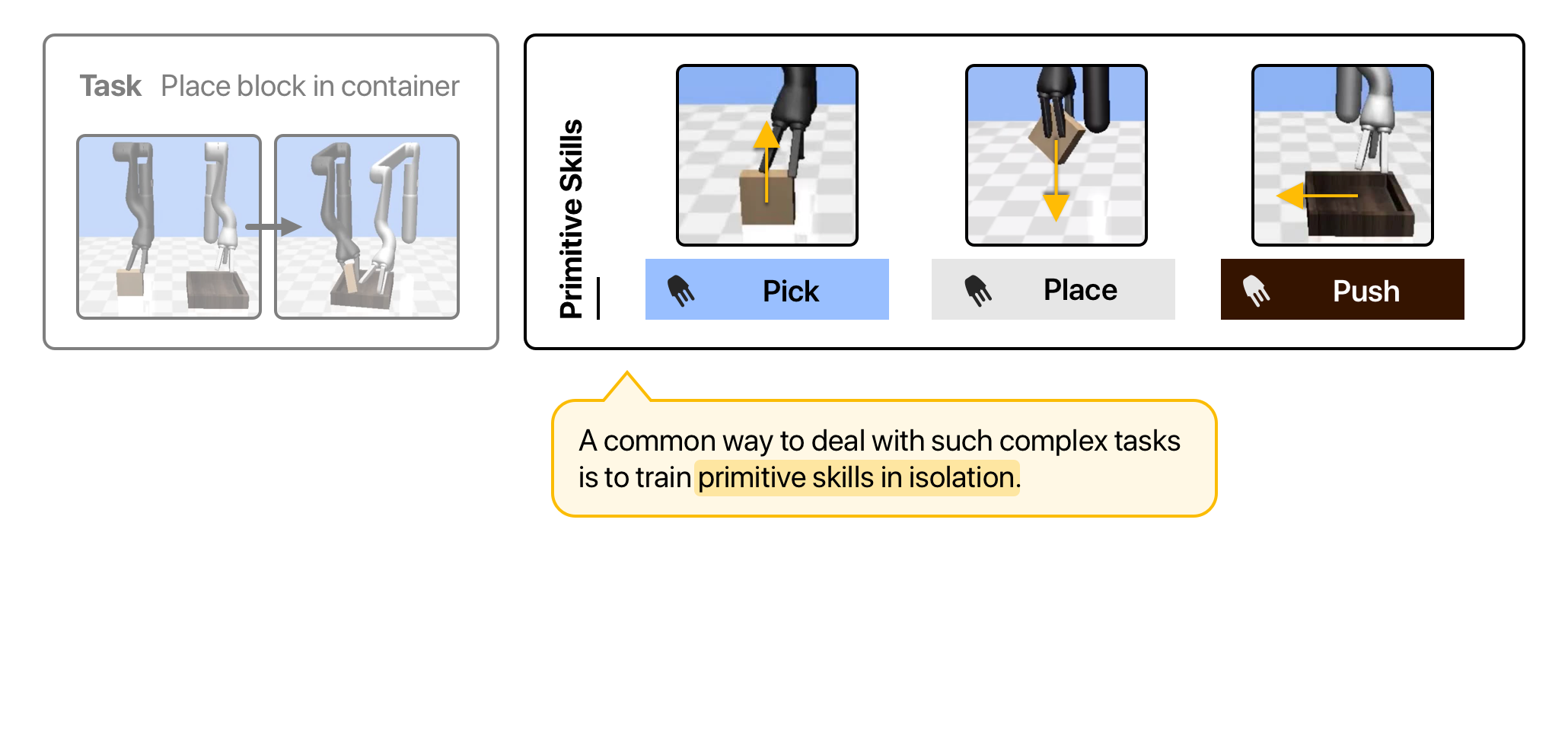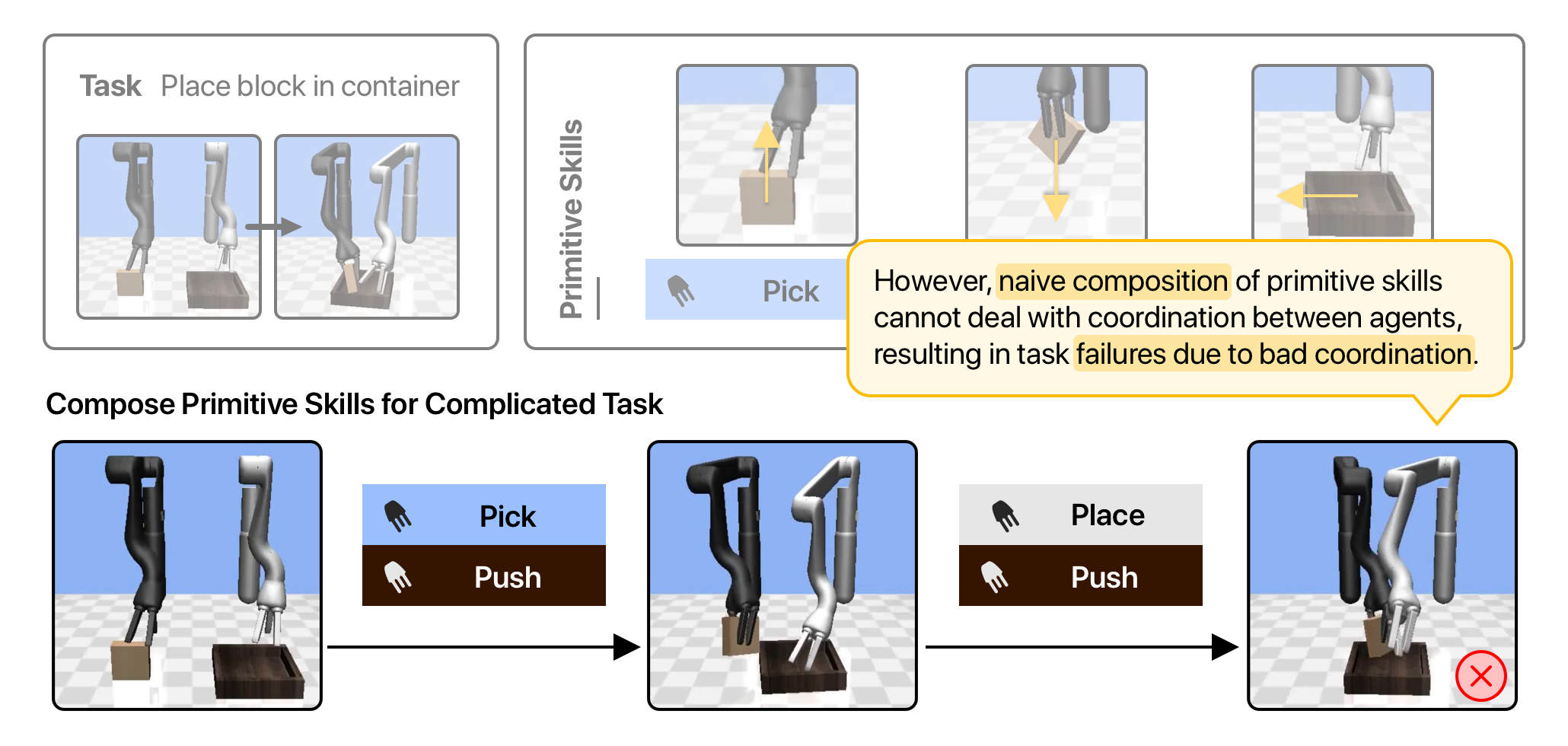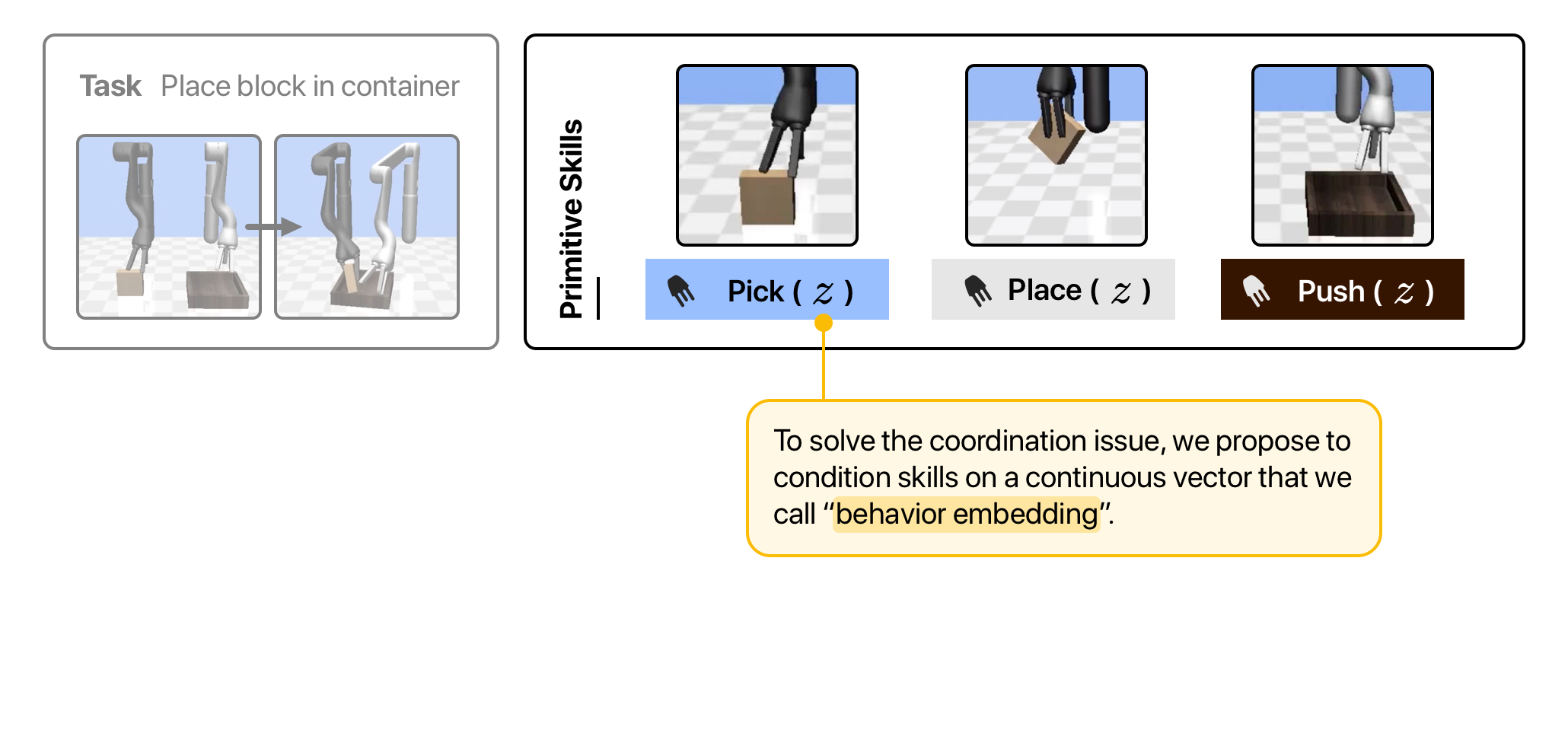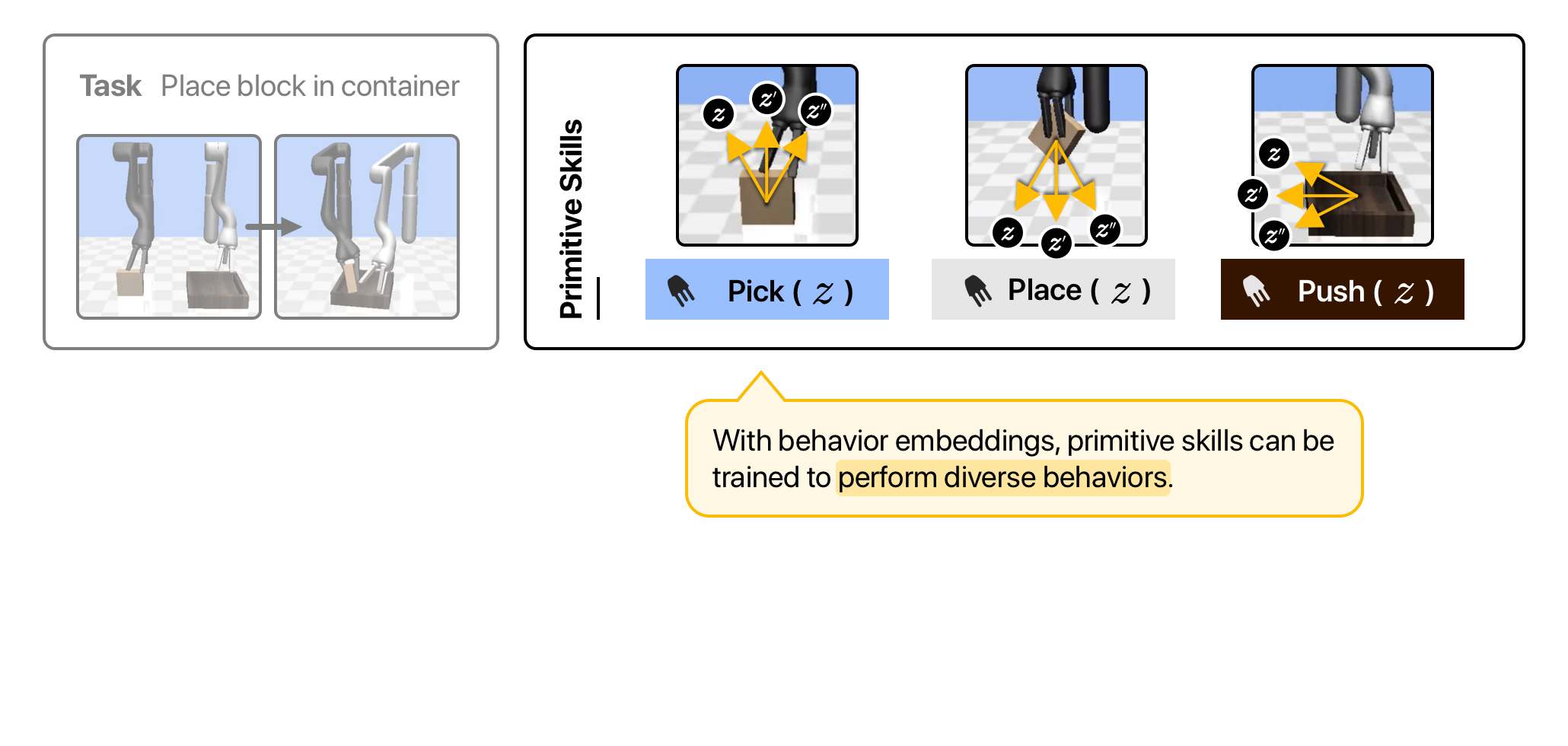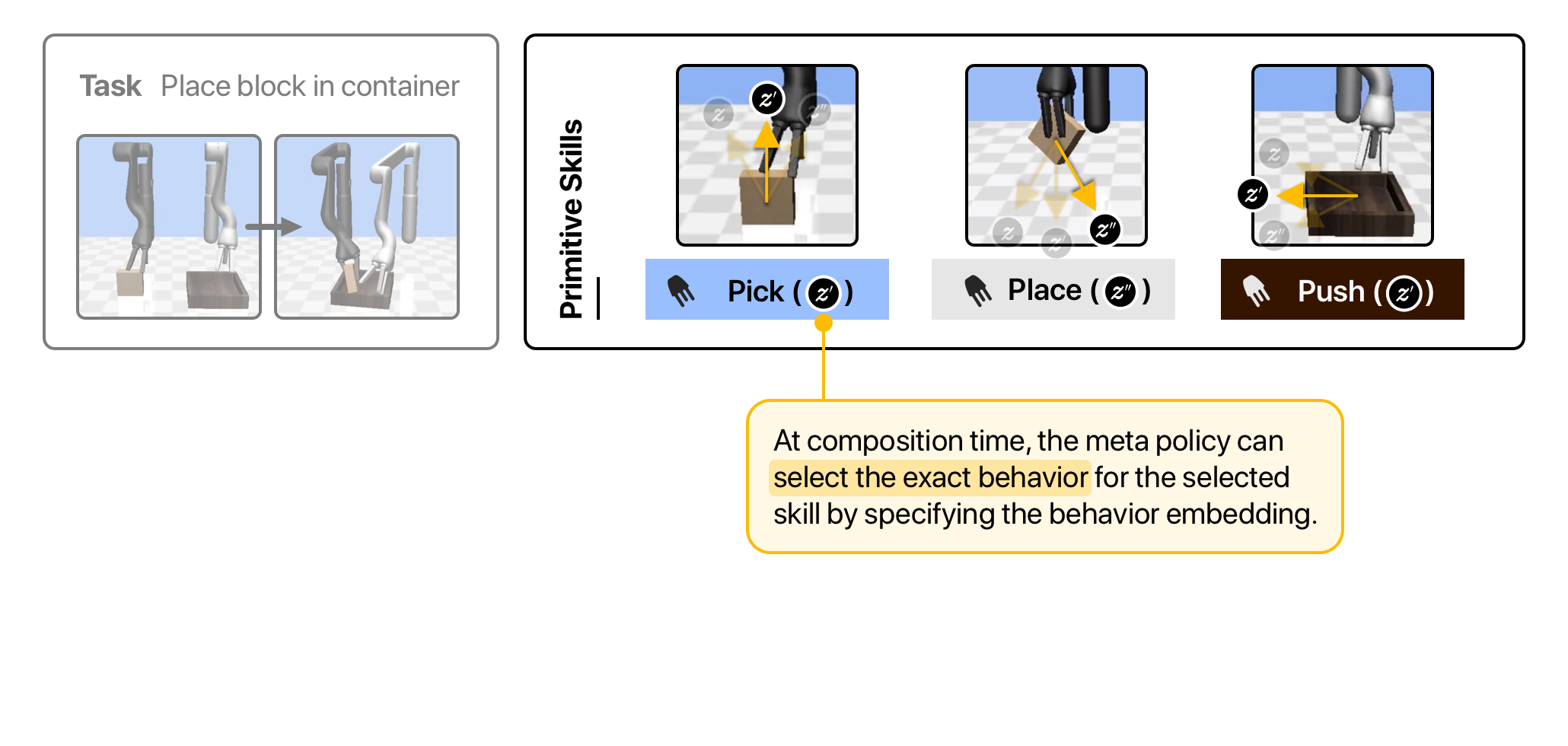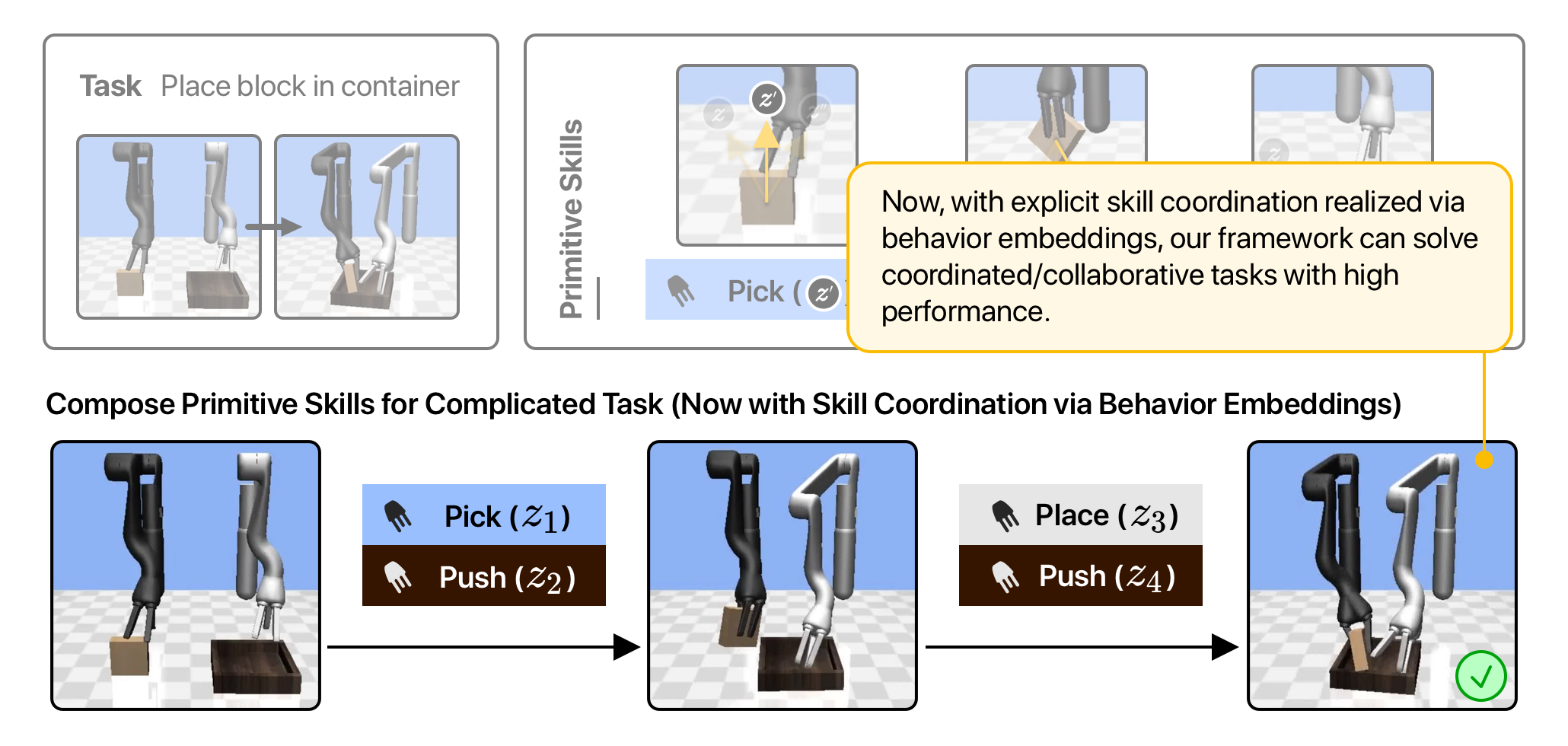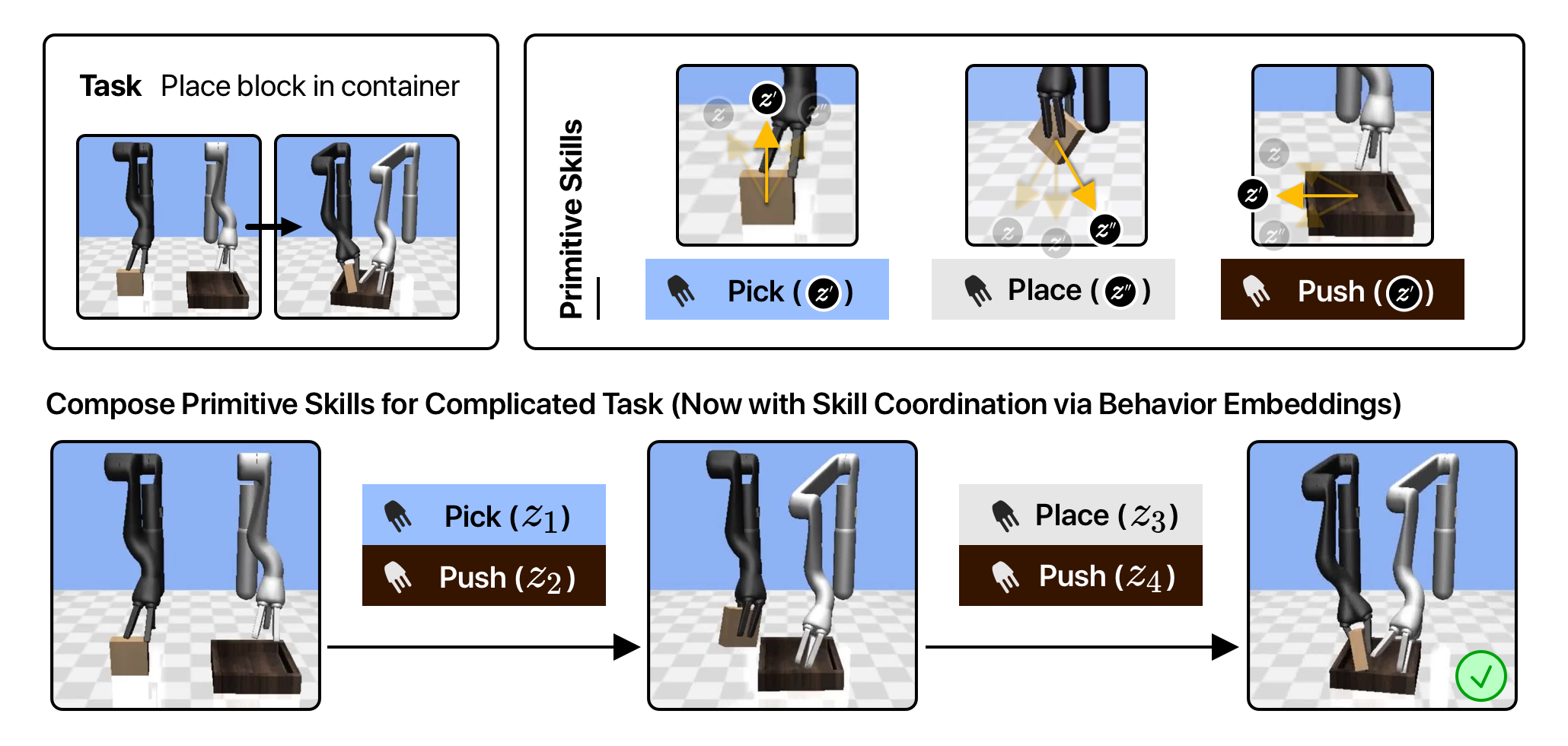
Motivation
When mastering a complex manipulation task, humans often decompose the task into sub-skills of their body parts, practice the sub-skills independently, and then execute the sub-skills together. Similarly, a robot with multiple end-effectors can efficiently learn to perform complex tasks by coordinating sub-skills of each end-effector.

Problem